自2021年以来,强化学习已经有了长足的发展, 这个系列主要回顾强化学习和对一些强化学习的拓展算法进行复现和整理。
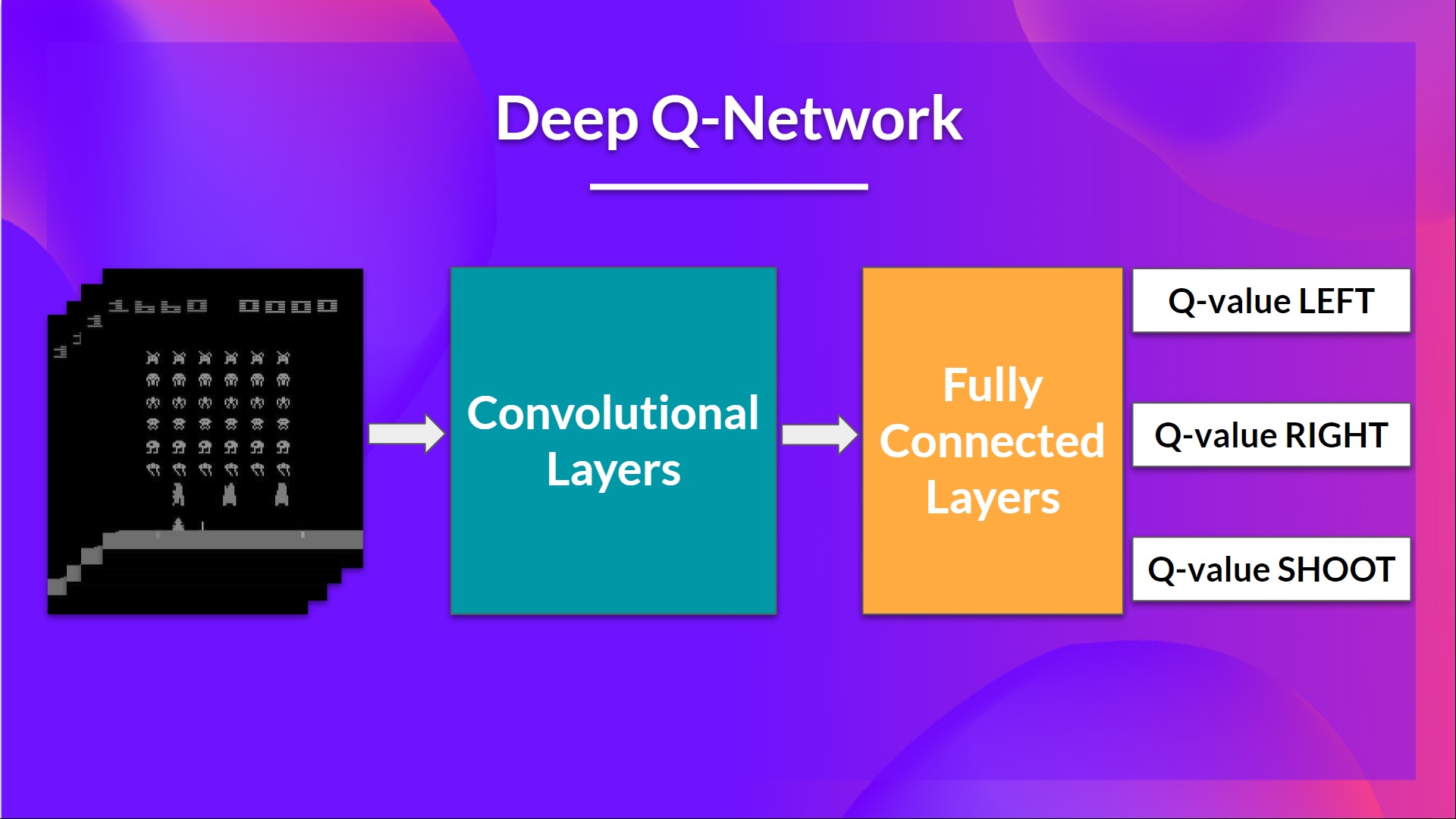
1. 深度Q学习深度Q学习将深度学习和强化学习相结合,是第一个深度强化学习算法。深度Q学习的核心就是用一个人工神经网络来代替动作价...
1. 引言腿式机器人在复杂地形中行走的能力使其成为探索、救援和军事等领域的重要研究对象。在本篇博文中,我们将探讨腿式机器人行走周期、行走运动公式、零力矩点(ZMP)和模型预测控制(MPC)等相关理论与实践方法。
2. 行走周期
腿式机器人的行走周期可...
1. 简介作为线性倒摆模型(LIPM)的步行线性倒摆模型(LIPM)是步行的最基本模型,假设身体的臀部高度是恒定的,其自然频率仅取决于高度。
在LIPM模型中,假设人体在步行时可以简化为一个线性倒摆(Linear Inverted Pendulum...
1. Repeat在机器人控制中,任务空间和配置空间分别代表了不同的控制目标和控制方法。以下是对任务空间和配置空间控制目标的详细描述和解释。
1.1 任务空间控制任务空间控制目标是指对机器人末端执行器的位置和姿态进行控制。任务空间控制的主要目标是使机...
1. Repeat1.1 正向运动学 Forward Kinematics目标:给定机器人的关节角度 ,找到末端执行器在笛卡尔空间中的姿态(位置和姿态)。
$${}^{w} \mathbf{H}{e e}(\mathbf{q})=? \quad \m...
1. Introduction在第一篇博客中,我们介绍了人形机器人建模的基础概念,包括空间运动的平移和旋转。本篇博客将深入探讨机器人学的运动学和动力学建模方法,特别是针对人形机器人的具体应用。
2. Kinematic Modeling运动学方程对于...
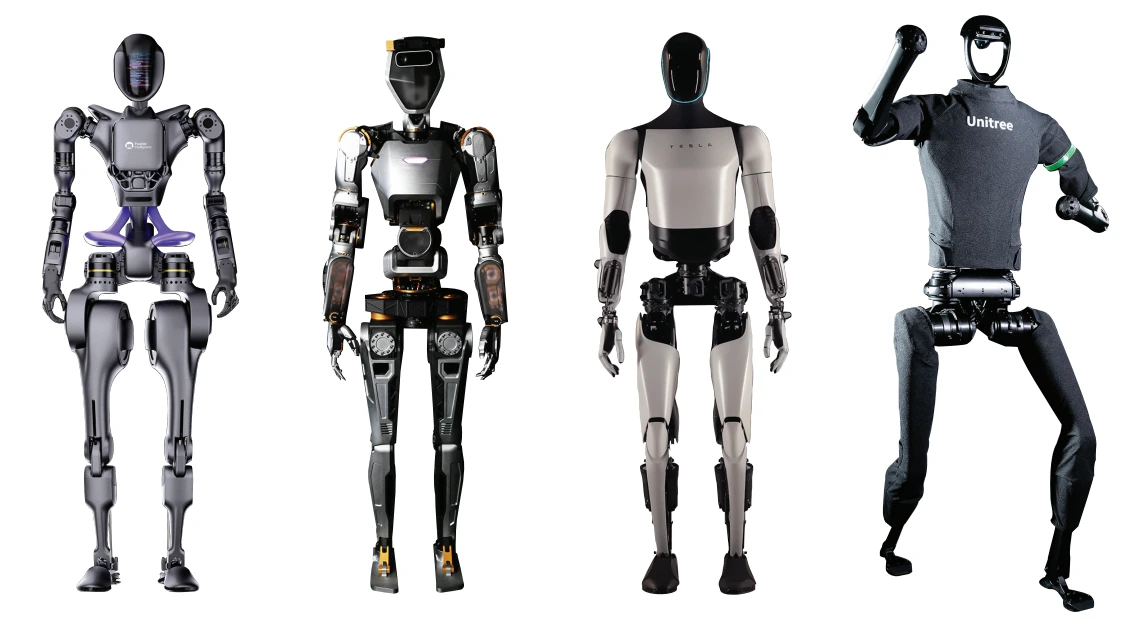
人形机器人,也被称为腿式机器人,相比于轮式机器人在崎岖地形上具有明显的优势。然而,这种机器人的优势也带来了复杂性的显著增加。虽然现在已经对如何使腿式机器人动态地行走和跑步有了深入的理解,但为了使其在能源、速度、反应性、多功能性和鲁棒性等方面达到更高的...
二阶线性动力学系统是指描述系统运动的二阶微分方程。这种系统在物理和工程中广泛应用,包括机械振动、电气电路、控制系统等。
二阶线性动力学系统的基本概念二阶线性动力学系统的基本形式是二阶线性常微分方程。其典型方程形式为:
这里:
是系统的响应(如位...
This blog post outlines how to connect an ESP32 development board to the Robot Operating System (ROS) using WiFi.
Project Git...
1. Required EquipmentRequired equipment:
Raspberry Pi 4 Model B
Wi-Fi capability
MicroSD card: minimum 32GB
MicroSD to SD...